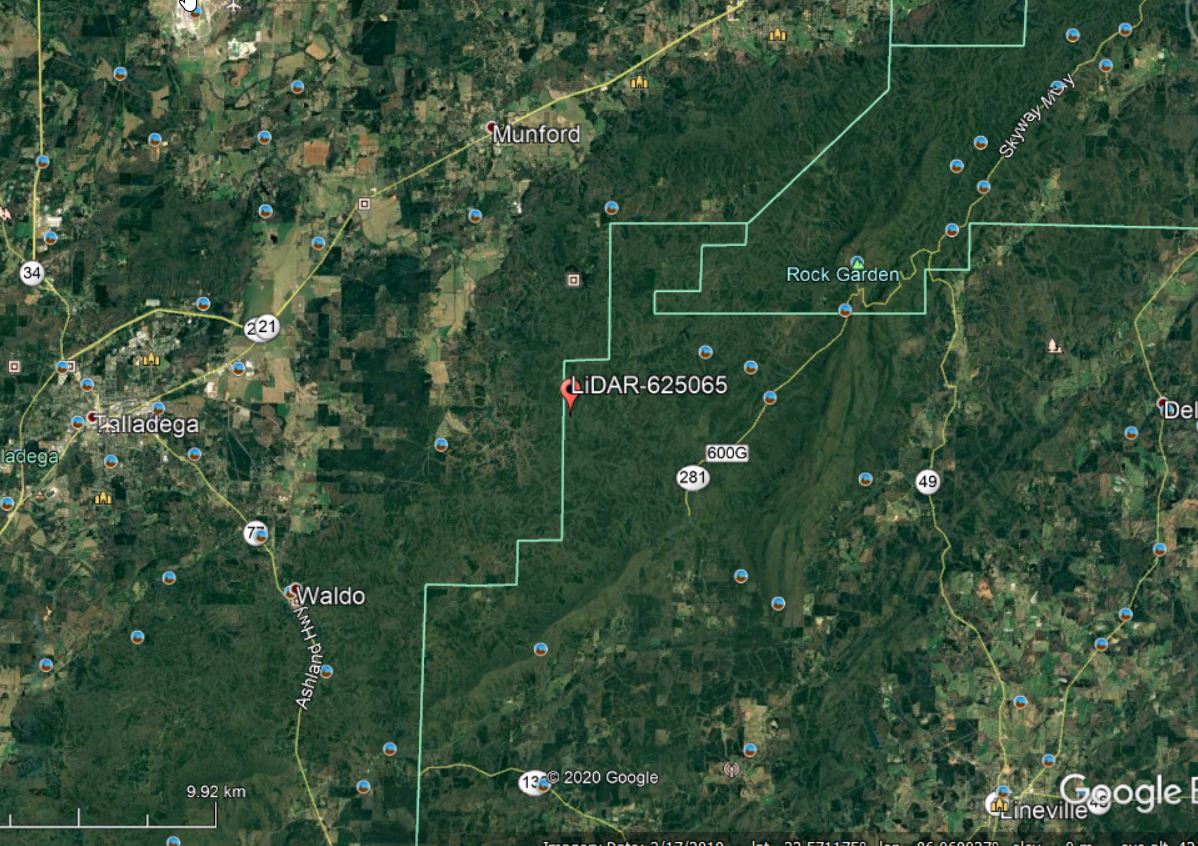
Lets continue with the Talladega National Forest LiDAR dataset… I have provided a link to a KML of the LiDAR panel 625065 extent. Give the site a look in Google Earth to get a better feel for the site (Figure 1). A stream in the northern part of this site […]
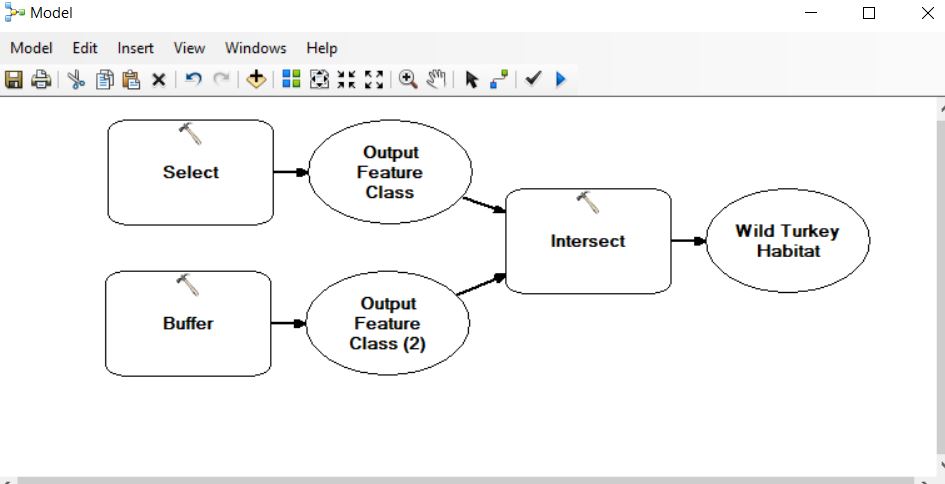
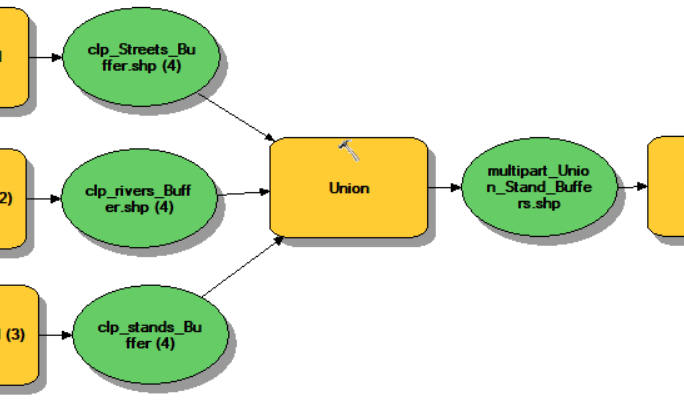
Last semester, I tasked students with describing suitable habitat for four animals: wild turkey, timber rattlesnake, striped skunk, and the black bear. Your task this week in lab is to develop a model to highlight these ‘suitable’ areas for each of the critters. You will use the topological operators I […]
Use the RCWData linked from the Lab section of our ELC page. I fixed the original shapefiles by exporting them to a file geodatabase. Attribute table information: baac: basal area per acre (ft2) cuft: cubic foot volume per acre (ft3) age2018: December 31, 2018 age (For this exercise, assume you […]
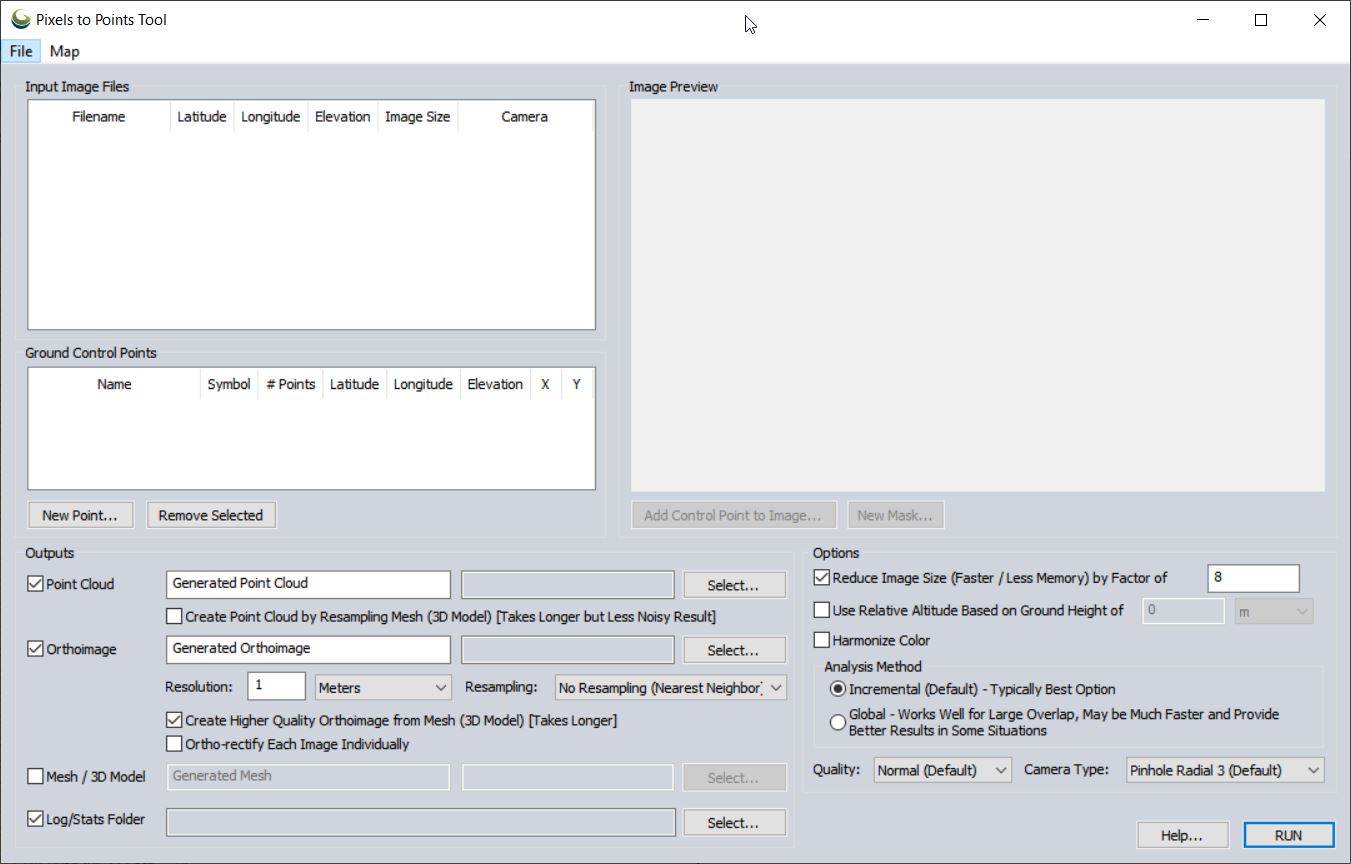
Pixels To Points Help In this lab, you will be processing drone data acquired on February 07, 2020 at the terraced section of the UGA Botanical Garden. The photos were captured with the DJI Phantom 4 Professional using the DJI Ground Station software running on an iPAD mini; the drone […]
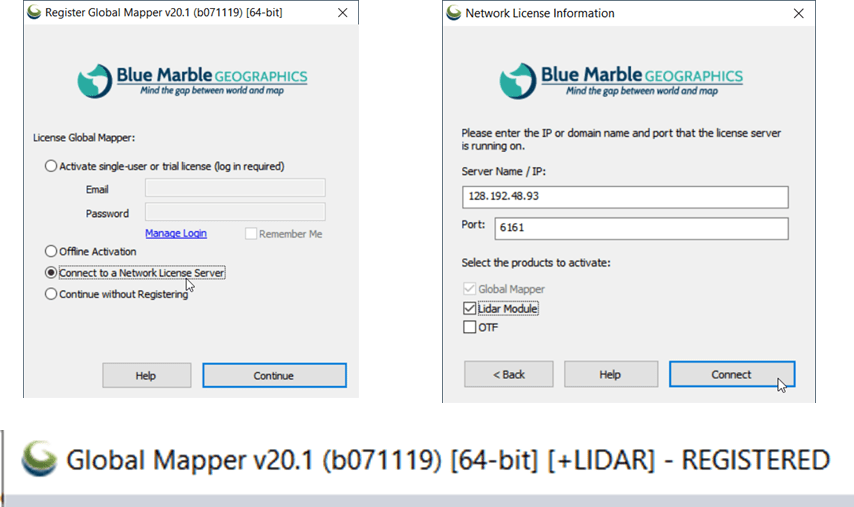
The following instructions step you through the process of connecting to the Warnell Global Mapper license server. If you are interested, you can install Global Mapper on your personal computer or lab machine, too. Download the installation files from the Global Mapper website (https://www.bluemarblegeo.com/products/global-mapper-download.php) and connect to the license server […]
Part 107 Regulations, Pilot Requirements (my crib notes from RemotePilot101/Lesson1: Rules and Regulations) Definitions: Remote Pilot In Command (PIC) – has the final authority of all sUAS operations; is not necessarily the person controlling the aircraft Visual Observer (VO) – person acting as a flight crew member to help ‘see and […]
Part 107 Regulations, Pilot Requirements Basic information and operator must know for flying under the small UAS rule (14 CFR part 107) FAA Commercial Operations Branch: Part 107 UAS Operations Pilot Requirements: Must be at least 16 years old Must pass an initial aeronautical knowledge test at an FAA-approved knowledge testing […]
Important links: FAA ‘Recreational Flyers: Fly Safe. Have Fun. (YouTube Webinar (0:00 – 11:45) FAA Recreational Flyers & Modeler Community-Based Organizations Background The model aircraft community is currently in a state of flux. Recreational flyers have been operating under the guidelines specified in Section 336 of the FAA Modernization and […]
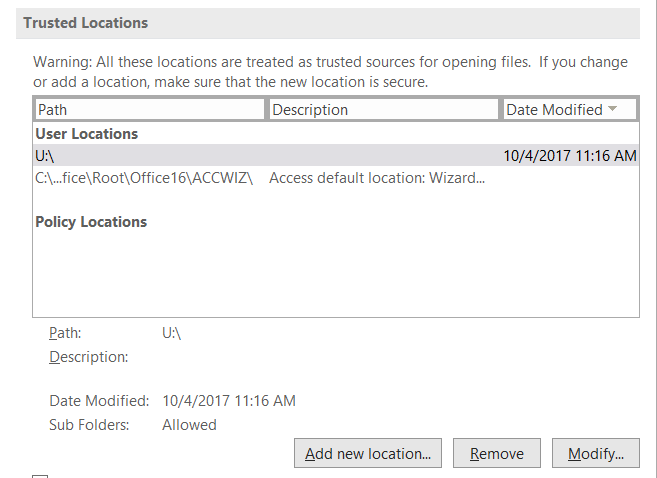
(Updated October 10, 2021 – I was unable to import state tables into the FIADB using the most recent version of MS Access (v 2109 Build 16.0.14430…) on my computer at home. It might be a version issue since the download site reverences MS Access 2007. I am checking into […]
.. .. What is FIA? https://www.fia.fs.fed.us/library/fact-sheets/overview/What_is_FIA_FS_2018_update.pdf The Enhanced Forest Inventory and Analysis Program – National Sampling Design and Estimation Procedures. This is the document you should reference when talking about the FIA. (http://www.treesearch.fs.fed.us/pubs/20371) Executive Summary: PDF page 9 1998 Farm Bill required: PDF page 14 Phase 1: PDF page 22 […]