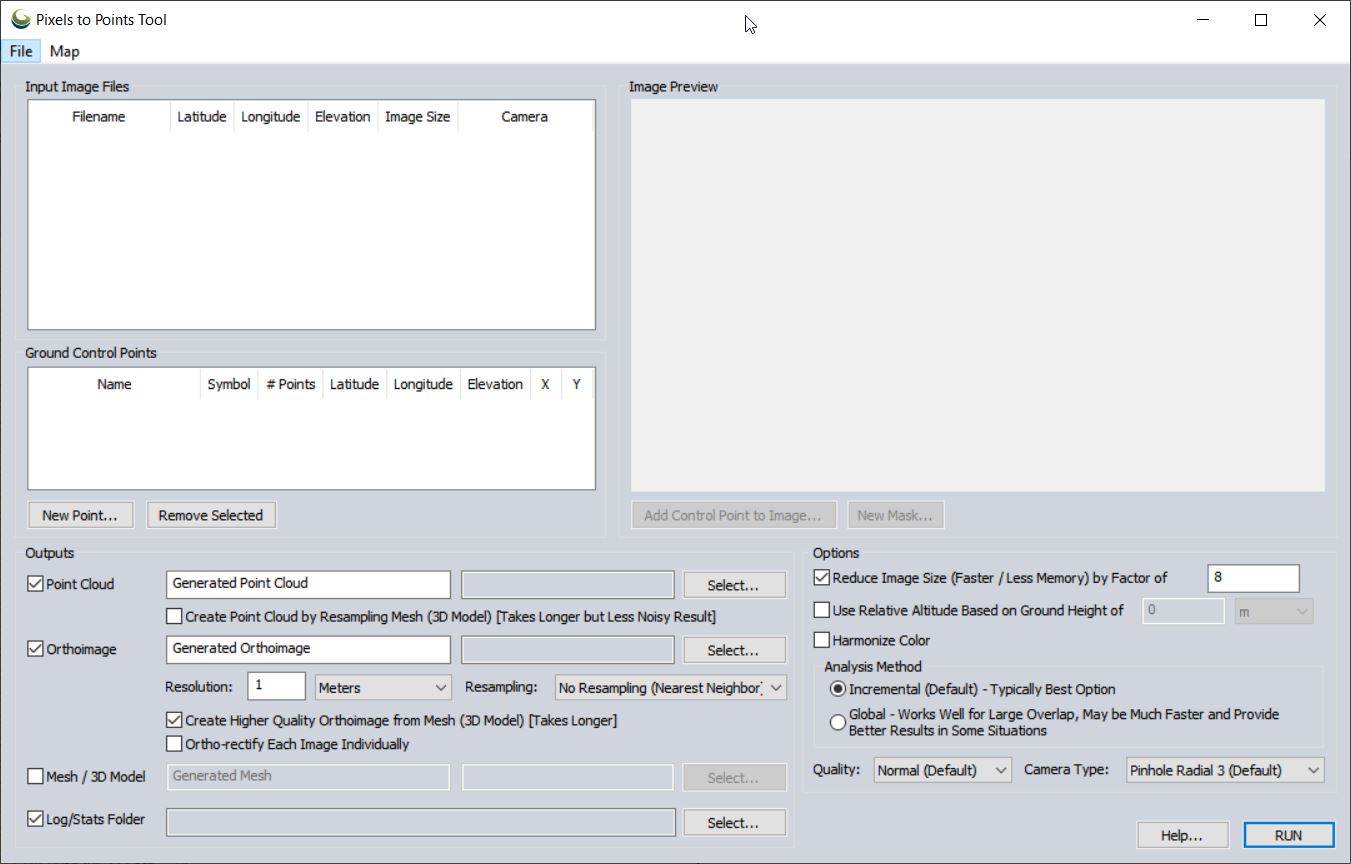
Pixels To Points Help In this lab, you will be processing drone data acquired on February 07, 2020 at the terraced section of the UGA Botanical Garden. The photos were captured with the DJI Phantom 4 Professional using the DJI Ground Station software running on an iPAD mini; the drone […]
Spring2018
20 posts
Pixels To Points Help In this lab, you will be processing drone data acquired on February 07, 2020 at the terraced section of the UGA Botanical Garden. The photos were captured with the DJI Phantom 4 Professional using the DJI Ground Station software running on an iPAD mini; the drone […]
Download Lab Data Files Here 3-dimensional surface model from iPhone 6 video (Autodesk ReCap Pro 2018) In this lab, we will take a look at a ground-based approach of generating a 3 dimensional surface model. First we will consider the Warnell wood pile example. However neat you think this output may be, […]
Photo Info CSV I have over three years of drone photos stored on my computer. Unfortunately, I have not kept track of when/where/why I have flown. I do, however, have only a handful of directories in which I have saved these photos. I need to search specific directories on […]
FORS 5640/7640 Final Exam When: May 2, 2018, from 12 – 3 (if you have a conflict, please let me know as soon as possible) Where: In the GIS Lab Format: Closed book/Closed note; multiple choice Don’t forget upload your Remote Pilot 101 Quiz 1 – 9 […]
Mission planning for vertical surfaces Ground Control Software I will give a short demonstration of four common (DJI-based) ground control software: DJI GO 4, GS Pro, Map Pilot, and Pix4Dcapture. For the most part, flight planning with these software is completed on site, in the field. Agisoft Photoscan I have been […]
Lab 10: Coarse woody debris volume remaining after harvest [Excerpt from Brian Davis’ 2017 thesis,”REFINEMENT OF A DRONE-BASED METHOD FOR ESTIMATING COARSE WOODY DEBRIS AND BIOMASS RESIDUE FOLLOWING FOREST HARVEST”] "… Pine forests of the southern US are a major source of woody debris residues used for bioenergy (Milbrandt 2005). […]


Improvement of clip by extent example from Wednesday… The following code clips the LAS to the boundary of the shapefile. (example data) library(lidR) library(rgdal) setwd("c:/temp/sf/") tdat<- readLAS("sp2_pcloud.las") plot(tdat) tpoly<- readOGR( ".","AnalysisUnit") clpdat <- lasclipPolygon(tdat, tpoly@polygons[[1]]@Polygons[[1]]@coords[,1], tpoly@polygons[[1]]@Polygons[[1]]@coords[,2]) plot(clpdat) COARSE WOODY DEBRIS EXAMPLE: Task at hand is to determine […]

Today’s scenario. We need to perform a similar analysis on a site I flew last summer. We are only interested in the area outlined in red (screenshot below). INPUT DATA: Input LAS: sp2_pcloud.las (DropBox Link) Processing extent: AnalysisUnit.shp R WORKFLOW: Clip input data to processing extent Classify ground points Create […]